Il Gruppo di Robotica Indossabile
“Al Gruppo di Robotica Indossabile della Scuola Superiore S. Anna di Pisa, dichiara il progettista meccanico Marco Ciampini, ci occupiamo di disegnare dei robot, dei dispositivi meccanici ed elettronici, attuati e dotati di sensori, di alimentatori e di una serie di componenti che li fanno muovere in maniera autonoma. Sono dei robot che possono essere adattabili alle diverse forme delle diverse parti del corpo umano. Il mio ruolo nel Gruppo di Robotica Indossabile è quello di studiare delle soluzioni meccaniche, disegnare, costruire e montare addosso ai nostri pazienti dei sistemi che possano essere i più flessibili possibili rispetto a quelle che sono le particolari necessità dell’indossatore…”
La robotica indossabile per la riabilitazione
“Noi ci occupiamo di piattaforme per la riabilitazione, prosegue Marco Ciampini, quindi di robot e macchinari che vanno ad aiutare e ad amplificare quelle che sono le capacità fisiche di una persona”.
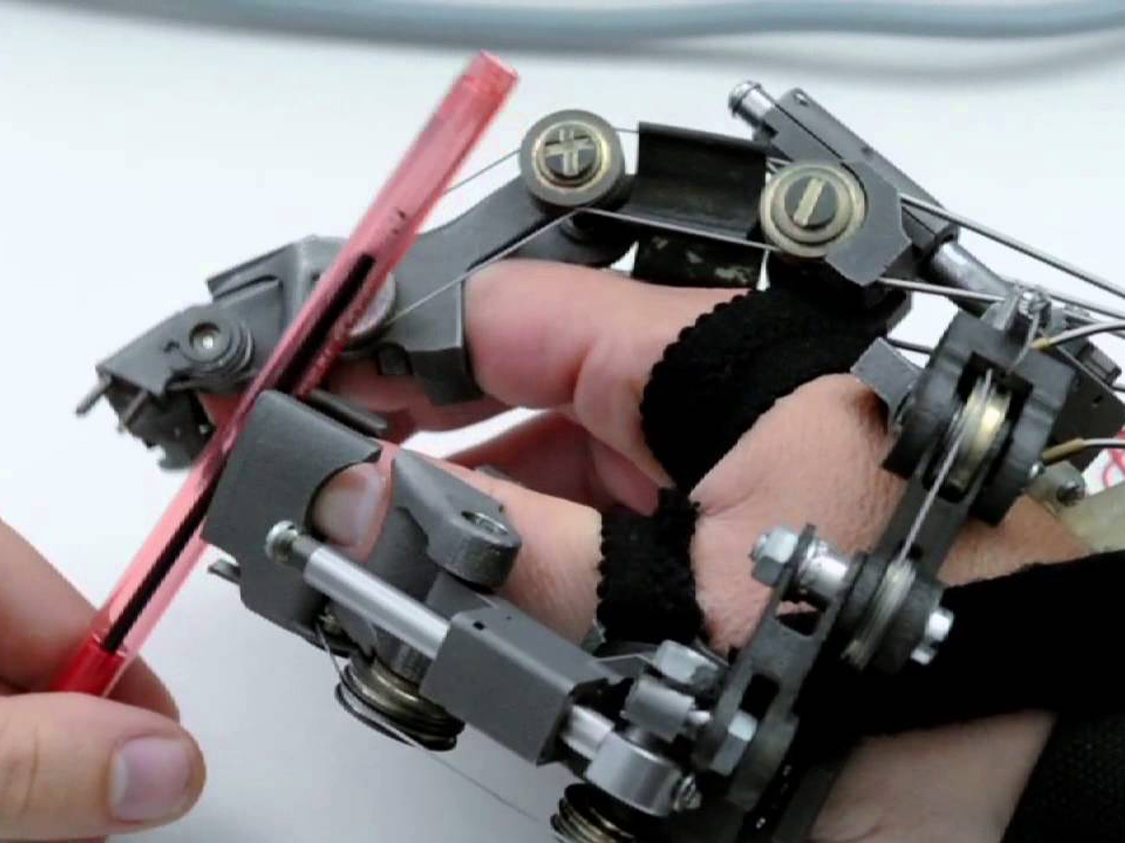
Esoscheletro della mano Handexos: Come funziona
“Con Handexos, esoscheletro della mano, possiamo muovere l’indice e il pollice, afferma l’Ingegnere elettronico Mario Cortese, possiamo effettuare tutte le prese della vita di tutti i giorni come la presa laterale che può essere utile per le chiavi e la carta di credito, oppure la presa di precisione che viene impiegata durante la scrittura, quindi l’uso della penna e delle pinzette”.
Esoscheletro controllato da un computer
“Sono io che controllo Handexos, continua Mario Cortese, posso fare una chiusura e un’apertura completa dell’esoscheletro…poi è possibile controllare singolarmente le varie parti dell’esoscheletro e quindi è possibile controllare l’mcp, il giunto dell’indice, o solamente le ultime due falangi e poi muovere esclusivamente anche il pollice. Tutto questo grazie all’utilizzo di un computer e della meccanica che è collegata attraverso il box di elettronica che gestisce Handexos. La soluzione nei prossimi mesi sarà quella di integrare il computer e tutta la parte di sensori di attuazione all’interno di un box elettronico di queste dimensioni in modo da essere facilmente trasportabile in tutto il mondo”.
Il progetto Cyberlegs, esoscheletro per la gamba
“Oltre all’ esoscheletro di arto superiore e di mano – spiega l’Ingegnere aerospaziale Mariele Peroni – ci occupiamo di un altro progetto, il progetto Cyberlegs. E’ un progetto finanziato dall’Unione Europea e coordinato dalla Scuola Superiore di S. Anna. Questo progetto riguarda un’ortesi, quindi un esoscheletro di arto inferiore abbinato ad una protesi. Il progetto è rivolto ad amputati transfemorali, quindi persone che hanno subito un’amputazione a metà del femore e che di solito hanno problemi vascolari. Questo li porta ad affaticarsi molto durante l’utilizzo della protesi e di conseguenza porta spesso al mancato utilizzo della protesi stessa. Lo scopo è quindi quello di utilizzare insieme alla protesi un’ortesi, un esoscheletro, nell’altra gamba che aiuta l’amputato durante la camminata, questo quindi per ridurre il consumo metabolico. Il progetto è appena partito – conclude Mariele Peroni – stiamo ora lavorando su un primo prototipo che sarà pronto nei mesi prossimi…”
Esoscheletro della mano ma non solo… La Scuola Superiore S. Anna di Pisa, con i suoi ricercatori, è sempre all’avanguardia nella ricerca e nella sperimentazione.
Articolo tratto dal sito Ability Channel